Learning-Initialized Trajectory Planning in Unknown Environments
Abstract
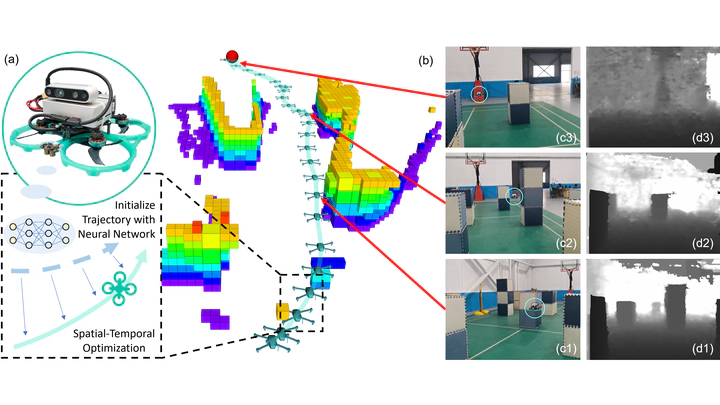
Autonomous flight in unknown environments requires precise planning for both the spatial and temporal profiles of trajectories, which generally involves nonconvex optimization, leading to high time costs and susceptibility to local optima. To address these limitations, we introduce the Learning-Initialized Trajectory Planner (LIT-Planner), a novel approach that guides optimization using a Neural Network (NN) Planner to provide initial values. We first leverage the spatial-temporal optimization with batch sampling to generate training cases, aiming to capture multimodality in trajectories. Based on these data, the NN-Planner maps visual and inertial observations to trajectory parameters for handling unknown environments. The network outputs are then optimized to enhance both reliability and explainability, ensuring robust performance. Furthermore, we propose a framework that supports robust online replanning with tolerance to planning latency. Comprehensive simulations validate the LIT-Planner’s time efficiency without compromising trajectory quality compared to optimization-based methods. Real-world experiments further demonstrate its practical suitability for autonomous drone navigation.
Yicheng Chen
PhD student in robotics
I am interested in motion planning problems in aerial robotics.