Learning to Initialize Trajectory Optimization for Vision-Based Autonomous Flight in Unknown Environments
Abstract
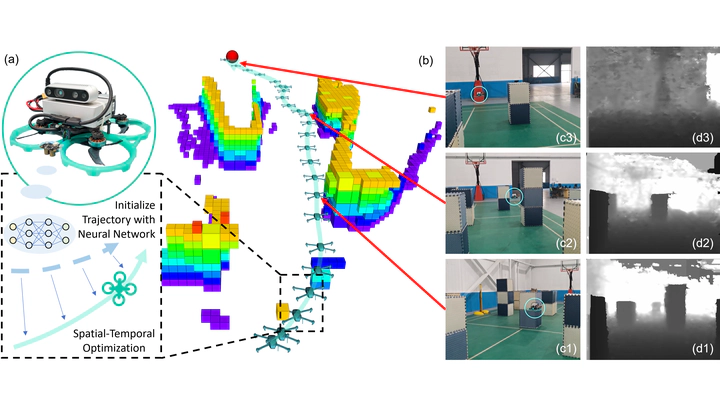
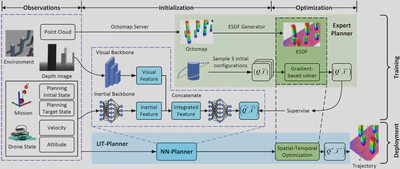
Autonomous flight in unknown environments requires precise spatial and temporal trajectory planning, often involving computationally expensive nonconvex optimization prone to local optima. To overcome these challenges, we present the Neural-Enhanced Trajectory Planner (NEO-Planner), a novel approach that leverages a Neural Network (NN) Planner to provide informed initial values for trajectory optimization. The NN-Planner is trained on a dataset generated by an expert planner using batch sampling, capturing multimodal trajectory solutions. It learns to predict spatial and temporal parameters for trajectories directly from raw sensor observations. NEO-Planner starts optimization from these predictions, accelerating computation speed while maintaining explainability. Furthermore, we introduce a robust online replanning framework that accommodates planning latency for smooth trajectory tracking. Extensive simulations demonstrate that NEO-Planner reduces optimization iterations by 20%, leading to a 26% decrease in computation time compared with pure optimization-based methods. It maintains trajectory quality comparable to baseline approaches and generalizes well to unseen environments. Real-world experiments validate its effectiveness for autonomous drone navigation in cluttered, unknown environments.
Yicheng Chen
PhD student in Mechanical Engineering
I am interested in motion planning problems in aerial robotics.