SLAM Practice on Unmanned Ground Vehicles
I have implemented some basic SLAM algorithms on unmanned ground vehicles (UGVs) including a TurtleBot and an Ackerman mini vehicle.
TurtleBot
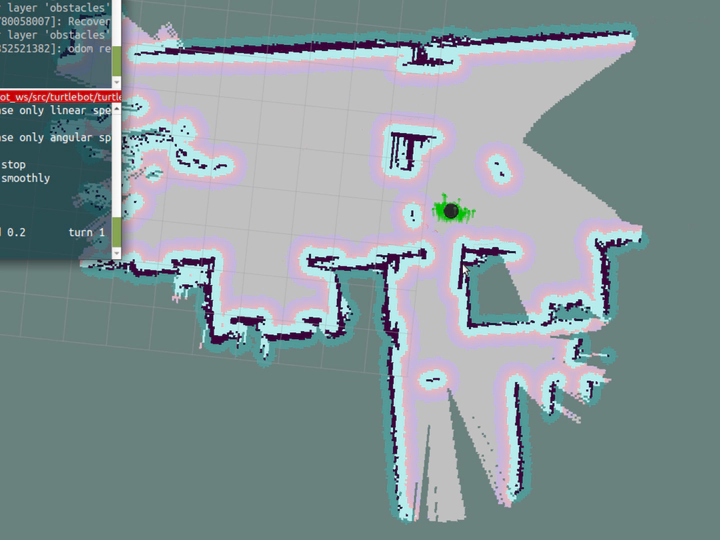
I have implemented G-mapping on the TurtleBot.

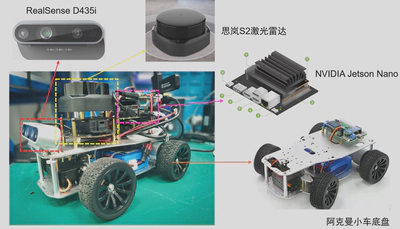
Ackerman mini vehicle
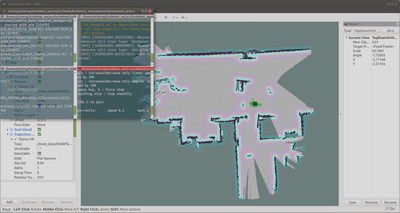
I have implemented Gmapping and RTAB-Map on the Ackerman mini vehicle. I also implemented a motion planning algorithm based on Dijkstra with TEB planner to navigate it through obstacles.
Yicheng Chen
PhD student in robotics
I am interested in motion planning problems in aerial robotics.