2018 Beihang Robot Competition
Challenge
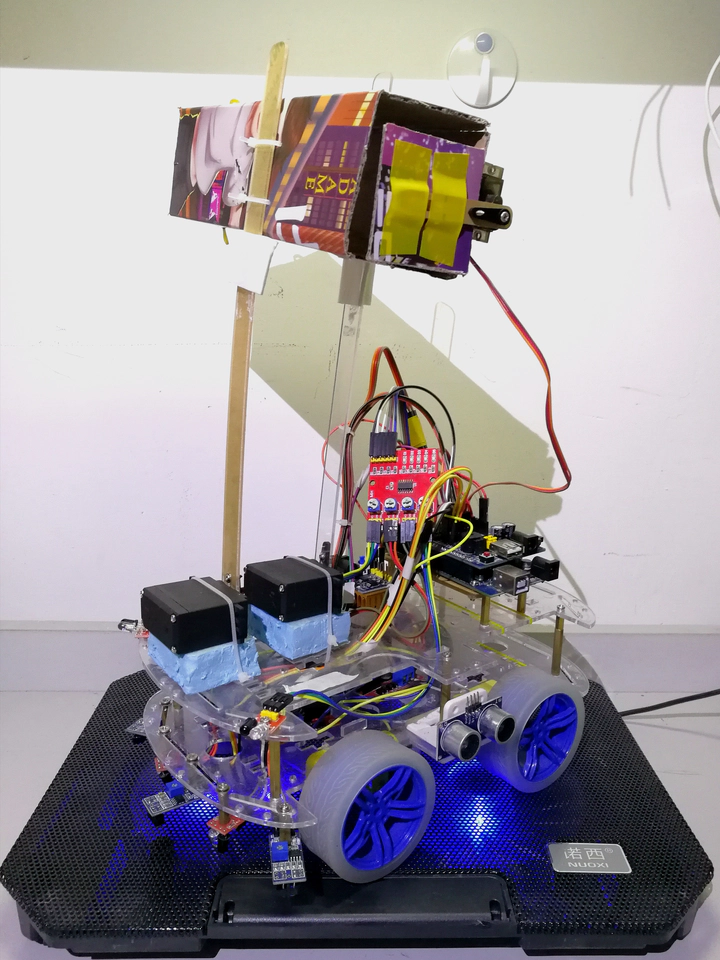
This competition requires participants to build a robot with the following functions: line tracking, obstacle avoidance, object grabbing, and Bluetooth remote control. Participants will be ranked based on the quality and duration of completing a series of tasks.
Solutions
Built a multifunctional wheeled robot from scratch: Used Arduino as the computer. Incorporated infrared modules and ultrasonic modules for line tracking and obstacle avoidance in a reactive manner. Made a cylinder with a rubber band that can take objects in. Achieved remote control via the Bluetooth module and an Android Application.
Highlight
We ranked the 4th place in the final.
Yicheng Chen
PhD student in robotics
I am interested in motion planning problems in aerial robotics.